
Le réseau CAN est le système nerveux de l’électronique embarquée. Il relie les calculateurs, fait circuler les informations vitales entre moteur, freinage, confort et éclairage, et permet à chaque module de réagir au bon moment sans alourdir le câblage. Dans cet article, je détaille son principe, les différences entre les variantes les plus courantes, les symptômes d’une panne, et les bons réflexes pour diagnostiquer ou ajouter un équipement sans perturber le véhicule.
L’essentiel à retenir sur le réseau CAN embarqué
- Le bus CAN fait communiquer les calculateurs d’un véhicule sur une paire de fils torsadés, avec une logique de priorité des messages.
- Le CAN classique monte jusqu’à 1 Mbit/s, avec des débits souvent plus bas en pratique, tandis que le CAN FD accepte jusqu’à 64 octets par trame et des phases de données bien plus rapides sur certains réseaux.
- Dans un poids lourd, on rencontre très souvent des architectures proches de SAE J1939, pensées pour les besoins des véhicules utilitaires et des engins de travail.
- Une panne CAN se manifeste souvent par plusieurs voyants, des fonctions absentes et des défauts de communication, pas par une seule pièce défaillante.
- Avant de remplacer un calculateur, je contrôle toujours l’alimentation, les masses, la continuité du faisceau, les connecteurs et la terminaison du réseau.
À quoi sert le réseau CAN dans une voiture
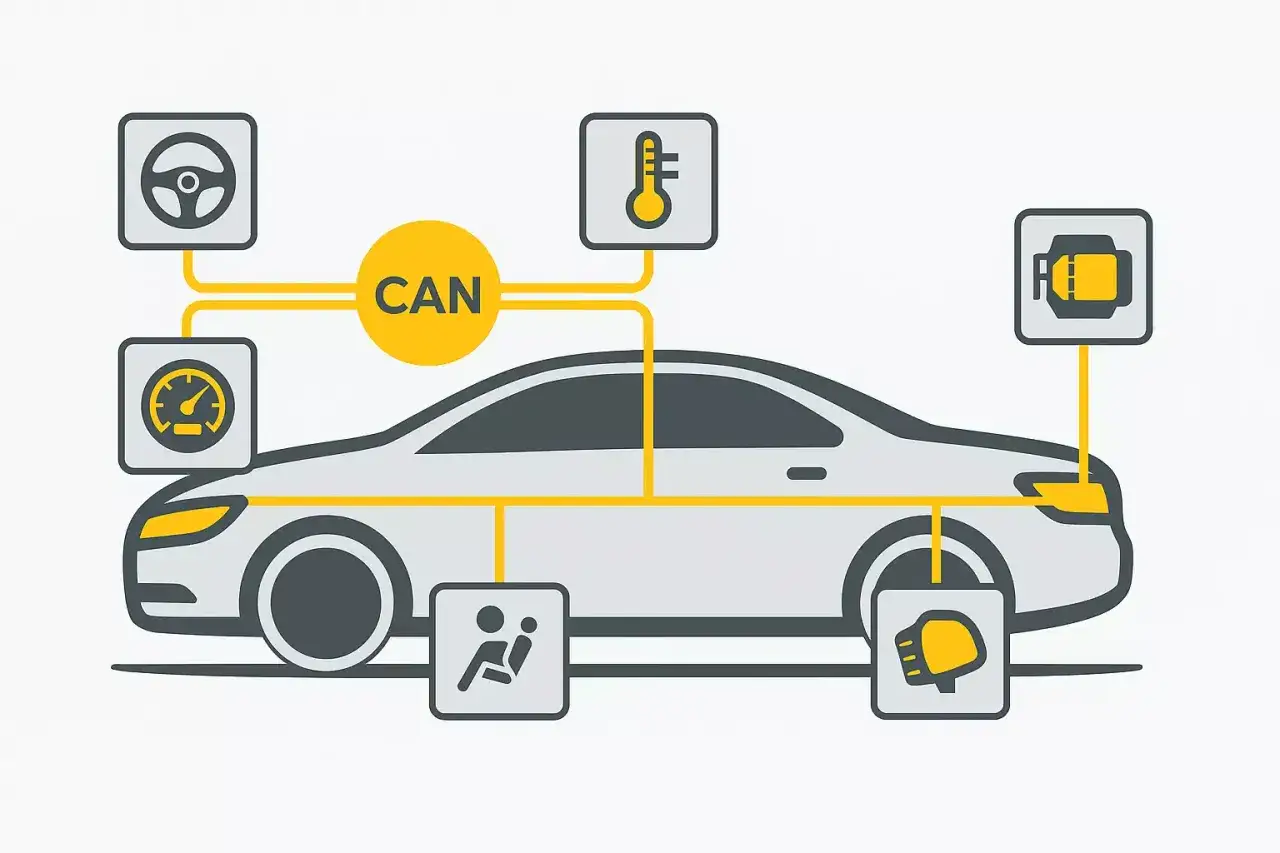
Quand j’ouvre un véhicule moderne, je ne le vois plus comme un assemblage de pièces indépendantes. Je le vois comme un ensemble de calculateurs qui partagent en permanence des informations: vitesse de roue, régime moteur, position de pédale, état d’une porte, température, pression, ordre d’allumage d’un module d’éclairage. Le CAN sert précisément à faire circuler ces données de façon rapide, fiable et robuste.
Concrètement, cela évite de tirer des dizaines de fils entre chaque organe. Un calculateur moteur n’a pas besoin de parler directement à chaque témoin, à chaque bouton ou à chaque actionneur par des lignes dédiées. Il publie ses informations sur le bus, et les autres modules les lisent s’ils en ont besoin. C’est plus propre, plus léger, plus simple à produire, et surtout beaucoup plus évolutif.
Dans une voiture particulière, le CAN gère souvent les systèmes de sécurité et de conduite comme l’ABS, l’ESP, l’airbag, le combiné d’instruments, la direction assistée ou la boîte automatique. Sur un utilitaire ou un camion, la logique est la même, mais l’architecture s’étend à la gestion de caisse, au freinage remorqué, aux interfaces de superstructures et aux fonctions de flotte. C’est là qu’on croise souvent des réseaux basés sur SAE J1939, une déclinaison très utilisée dans les véhicules lourds.
Autrement dit, quand on parle d’électricité embarquée, le CAN n’est pas un détail technique: c’est l’ossature de la communication interne. Et pour comprendre une panne, il faut d’abord comprendre comment ce réseau s’organise.
Comment le bus échange les messages sans se bloquer
Le principe du CAN est élégant. Tous les calculateurs partagent le même bus, mais ils ne parlent pas n’importe comment. Chaque message possède un identifiant qui sert aussi de priorité. Si deux modules veulent transmettre au même moment, le message le plus prioritaire gagne l’arbitrage sans provoquer de collision destructrice. C’est une des raisons pour lesquelles le CAN reste aussi apprécié dans l’automobile: il sait se discipliner tout seul.
Physiquement, on travaille en général avec une paire torsadée, appelée CAN-H et CAN-L. Cette géométrie réduit les perturbations électromagnétiques, ce qui est indispensable dans un véhicule où alternateur, moteurs électriques, relais et convertisseurs injectent beaucoup de bruit électrique. À chaque extrémité du bus, on trouve normalement une terminaison de 120 ohms. Réseau hors tension, une mesure correcte entre CAN-H et CAN-L donne souvent environ 60 ohms, parce que les deux terminaisons sont vues en parallèle.
Le CAN classique reste limité à 8 octets de charge utile par trame et à un débit théorique de 1 Mbit/s, même si en automobile on rencontre souvent des réseaux à 125, 250 ou 500 kbit/s selon la fonction et la longueur du faisceau. Le CAN FD va plus loin: il permet jusqu’à 64 octets par trame et des phases de données plus rapides, jusqu’à plusieurs Mbit/s selon les transceivers et l’architecture du réseau. En pratique, ce n’est pas juste une version “plus rapide” du CAN; c’est une réponse aux besoins de véhicules plus riches en capteurs, en assistance à la conduite et en données à transporter.
Je résume souvent le choix des bus comme cela:
| Variante | Ce qu’elle apporte | Usage fréquent |
|---|---|---|
| CAN classique | Robuste, simple, très répandu, charge utile de 8 octets | Moteur, ABS, confort, instrumentation |
| CAN FD | Charge utile plus grande et débits plus élevés sur la phase données | Véhicules récents, fonctions avancées, diagnostics plus riches |
| SAE J1939 | Structure normalisée pour les véhicules lourds | Camions, bus, engins, superstructures |
| LIN | Moins cher, plus lent, plus simple | Fonctions de confort ou actionneurs secondaires |
Ce point de vue aide beaucoup au diagnostic: quand le symptôme dépasse un seul organe, je pense d’abord au transport de l’information, pas à la pièce visible. C’est précisément ce qui mène aux fonctions qui dépendent le plus du réseau.
Les calculateurs qui en dépendent le plus
Le bus CAN n’alimente pas directement les composants, mais il leur donne les consignes et les données nécessaires pour travailler ensemble. Quand un maillon se dérègle, l’effet se propage vite. J’insiste sur ce point parce qu’il explique pourquoi une simple panne de communication peut immobiliser plusieurs systèmes en même temps.
| Système | Rôle du CAN | Ce que le conducteur peut remarquer |
|---|---|---|
| Moteur et transmission | Échange des charges, températures, demandes de couple, états capteurs | Mode dégradé, passage de rapports perturbé, voyant moteur |
| ABS et ESP | Diffuse les vitesses de roue et les états de stabilité | Voyants ABS/ESP, assistance réduite |
| Combiné d’instruments | Reçoit les infos de vitesse, régime, alertes et messages | Aiguilles figées, affichage absent, témoins incohérents |
| Éclairage et carrosserie | Commande les modules de phares, feux, verrouillage, essuie-glaces | Fonctions intermittentes, éclairage fantôme, confort capricieux |
| Poids lourds et utilitaires | Coordonne les blocs moteurs, les freins, la caisse et les équipements rapportés | Messages de défaut réseau, fonctions de carrosserie absentes, retards de réponse |
Dans les camions, je rencontre souvent des architectures où le CAN sert de colonne vertébrale à l’ensemble du véhicule, avec des priorités très strictes entre la chaîne cinématique et les fonctions de carrosserie. C’est logique: la sécurité et la conduite passent avant le confort. Cette hiérarchie explique aussi pourquoi certaines fonctions restent actives pendant qu’une autre partie du véhicule se met en défaut.
À ce stade, la vraie question devient simple: comment reconnaître un problème de bus sans confondre son symptôme avec celui d’un capteur ou d’un calculateur isolé?
Reconnaître une panne CAN avant de changer la mauvaise pièce
Je me méfie toujours des pannes qui touchent plusieurs fonctions à la fois. Quand trois témoins s’allument ensemble, qu’un module disparaît de la valise et qu’un autre affiche des données incohérentes, le problème n’est souvent pas localisé dans un seul composant. C’est typiquement le genre de situation où le réseau de communication mérite d’être inspecté avant tout remplacement coûteux.
Les symptômes qui orientent vers le réseau
- Plusieurs voyants simultanés sans lien apparent avec une seule pièce.
- Codes défaut de communication ou messages “signal manquant”, “message absent”, “perte de liaison”.
- Fonctions intermittentes qui reviennent après un coup de froid, de chaleur ou une vibration.
- Combiné d’instruments instable, affichage incomplet ou aiguilles incohérentes.
- Mode dégradé déclenché sans panne mécanique évidente.
Ce que je contrôle en premier
- Je vérifie la batterie, les masses et la stabilité de la tension d’alimentation.
- J’inspecte visuellement le faisceau: frottement, humidité, broche tordue, oxydation, réparation ancienne.
- Je lis les défauts avec l’outil de diagnostic avant d’effacer quoi que ce soit.
- Je mesure la résistance du bus hors tension: autour de 60 ohms, pas 120 ni une valeur erratique.
- Je contrôle ensuite la continuité et l’intégrité de la paire torsadée, surtout près des zones chaudes ou mobiles.
Les pièges que je vois le plus souvent
Le premier piège, c’est d’accuser trop vite un calculateur. Le second, c’est de négliger la masse: un réseau peut sembler en panne alors que le vrai problème vient d’une chute de tension sur le retour. Le troisième, plus discret, concerne les accessoires montés après coup. Un autoradio, un traceur, un boîtier de conversion ou un montage LED mal intégré peuvent perturber l’équilibre du bus, surtout si la terminaison ou l’isolement n’ont pas été respectés.
Quand le diagnostic est méthodique, on évite la spirale des remplacements inutiles. Et c’est justement cette discipline qui compte encore plus quand on ajoute un équipement ou qu’on fait du tuning proprement.
Ajouter un équipement ou du tuning sans déséquilibrer le réseau
Sur un véhicule moderne, brancher un accessoire ne consiste pas seulement à trouver du 12 volts. Il faut aussi comprendre sur quel réseau l’équipement doit parler, s’il doit seulement lire des messages ou en émettre, et surtout s’il risque de casser la logique de communication existante. C’est là que beaucoup d’installations “rapides” deviennent source de pannes longues à traquer.
Ce que je recommande avant toute modification
- Identifier le protocole utilisé par le véhicule ou par la zone à modifier: CAN, CAN FD, J1939 ou LIN.
- Éviter les dérivations sauvages sur la paire torsadée; un raccord mal fait suffit parfois à créer des réflexions et des défauts intermittents.
- Préférer un module de passerelle ou une interface prévue pour écouter le bus sans le charger.
- Respecter la terminaison et ne pas ajouter de résistance “pour essayer”. Sur CAN, on ne règle rien à l’aveugle.
- Tester la mise en veille du véhicule après montage, car un accessoire peut empêcher certains calculateurs de s’endormir correctement.
Lire aussi : Recharger sa batterie en roulant - Ça prend combien de temps ?
Quand une passerelle vaut mieux qu’un branchement direct
Si l’objectif est d’ajouter un afficheur, un boîtier télématique, une acquisition de données ou un module de contrôle auxiliaire, une passerelle réseau est souvent la solution la plus propre. Elle permet de lire certains messages, d’en reformater d’autres et de protéger le réseau principal contre les erreurs de charge ou de protocole. Sur un poids lourd, cette approche est encore plus pertinente, car les réseaux de carrosserie et de chaîne cinématique ne tolèrent pas la même manière d’intégrer un nouvel équipement.
Je le dis souvent aux techniciens: plus le véhicule est récent, plus l’intégration doit être pensée comme une architecture, pas comme un simple câblage. Cette logique nous amène à la dernière vérification, celle que je fais avant d’accuser le calculateur lui-même.
Les vérifications qui évitent les diagnostics coûteux
Avant de conclure à un module défectueux, je cherche toujours trois choses: l’alimentation correcte, la masse saine et la communication propre. Dans beaucoup de cas, le vrai coupable est un connecteur fatigué, une infiltration d’eau, une réparation de faisceau approximative ou un problème de terminaison sur le bus.
Si le véhicule revient régulièrement avec les mêmes codes, je garde les données figées, j’observe les conditions de déclenchement et je compare les moments de panne avec les vibrations, l’humidité, la température ou la charge électrique. C’est souvent là que se cache la logique du défaut. Une panne CAN n’est pas toujours spectaculaire; elle peut être discrète, intermittente et trompeuse, ce qui explique pourquoi un diagnostic précipité coûte cher.
Mon réflexe, au fond, est simple: je traite le réseau CAN comme une infrastructure critique. Quand elle est saine, le véhicule devient cohérent, lisible et réactif. Quand elle est perturbée, tout le reste semble suspect. C’est pour cela qu’un contrôle méthodique du bus, du faisceau et des masses reste l’un des meilleurs investissements de temps en électricité embarquée.